La Universitat Jaume I (UJI) presenta UJIFISH-I, peix robòtic modular per a l'aqüicultura que redueix l'estrès dels peixos
El Centre d'Investigació en Robòtica i Tecnologies Subaquàtiques (CIRTESU) de la Universitat Jaume I de Castelló ha creat un prototip experimental de peix robòtic modular i bioinspirat (UJIFISH) per a la inspecció, la teleoperació híbrida i el desplegament de sensors en l'acuicultura.
La novetat resideix en un disseny funcional que elimina factors d'estrès, com hèlixes o il·luminació d'alta intensitat, i manté estàndards de modularitat i interoperabilitat.
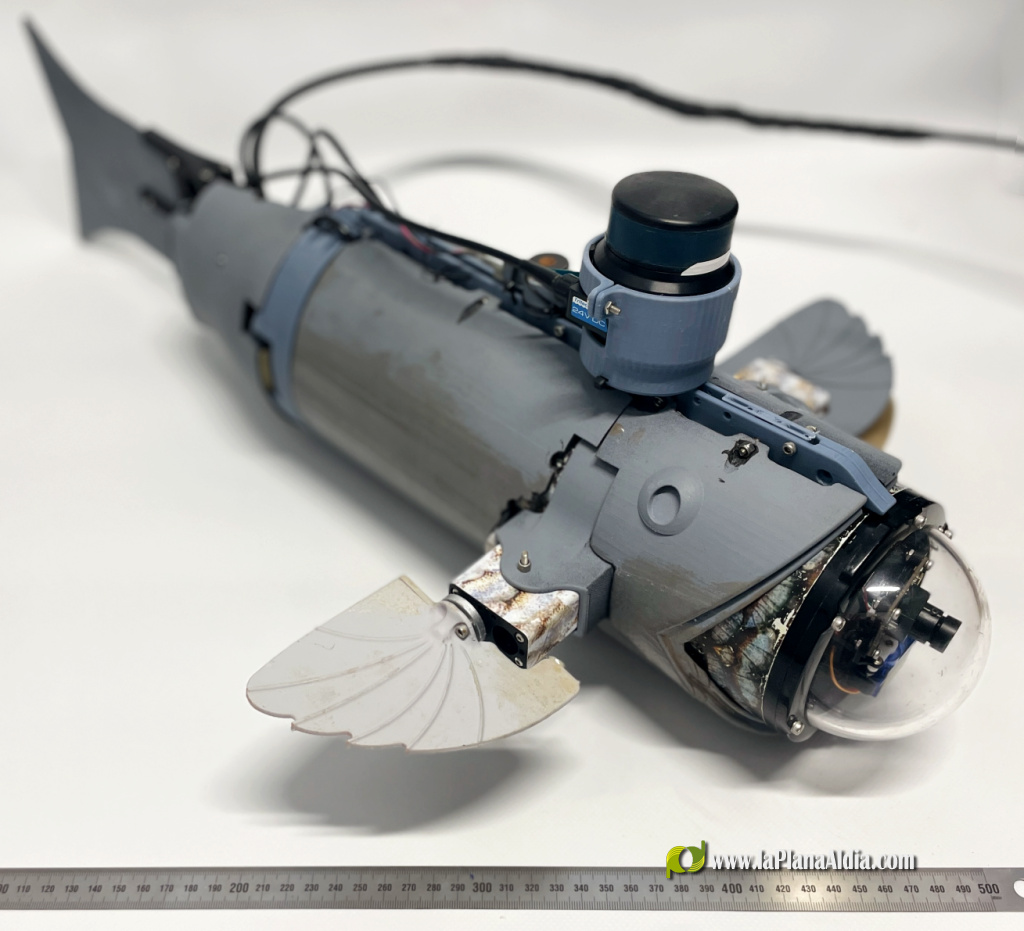
El disseny, desenvolupament i validació tècnica d'aquesta plataforma robòtica biomimètica amb forma de peix ha estat concebut per a minimitzar la perturbació de l'entorn i l'estrès que pateixen els peixos davant d'altres robots, gràcies a una arquitectura que utilitza una propulsió ondulatòria bioinspirada, que redueix el soroll mecànic, la turbulència hidrodinàmica i les perturbacions físiques que poden alterar el comportament natural.
Està equipat amb un avançat sistema de detecció modular per a l'adquisició de dades en temps real i transmissió simultània d'imatges, amb comunicació per cable, encara que la seua capacitat és híbrida i també pot comunicar-se per mòdem acústic.
Per a la visió, utilitza un sistema panoràmic de 180 graus que ofereix visió frontal i lateral. Pot descendir a 20 metres de profunditat i permet control remot a una distància de entre 150 metres (vertical) i 500 metres (horitzontal) mitjançant mòdem.
El seu disseny incorpora sensors per a mesuraments continus (temperatura de l'aigua i profunditat) i permet incorporar altres sensors per a recollir dades (salinitat i conductivitat, pH, oxigen dissolt o gasos).
Facilita la inspecció directa de les estructures de xarxa i el monitoratge de les condicions de l'aigua i de l'entorn proper als peixos, i compta amb un sistema de desplegament que permet transportar i alliberar components auxiliars en ubicacions específiques.
La geometria i les dimensions d'UJIFISH s'han escalat per a coincidir amb peixos adults i la seua freqüència de batuda de cua. El mecanisme de cua oscil·lant està accionat per servomotors impermeables; s'han eliminat tots els actuadors d'alta freqüència i s'ha prioritzat la integració de sensors interns per evitar senyals intermitents. D'aquesta manera, la natació produeix perfils hidrodinàmics més suaus i una menor perturbació acústica.
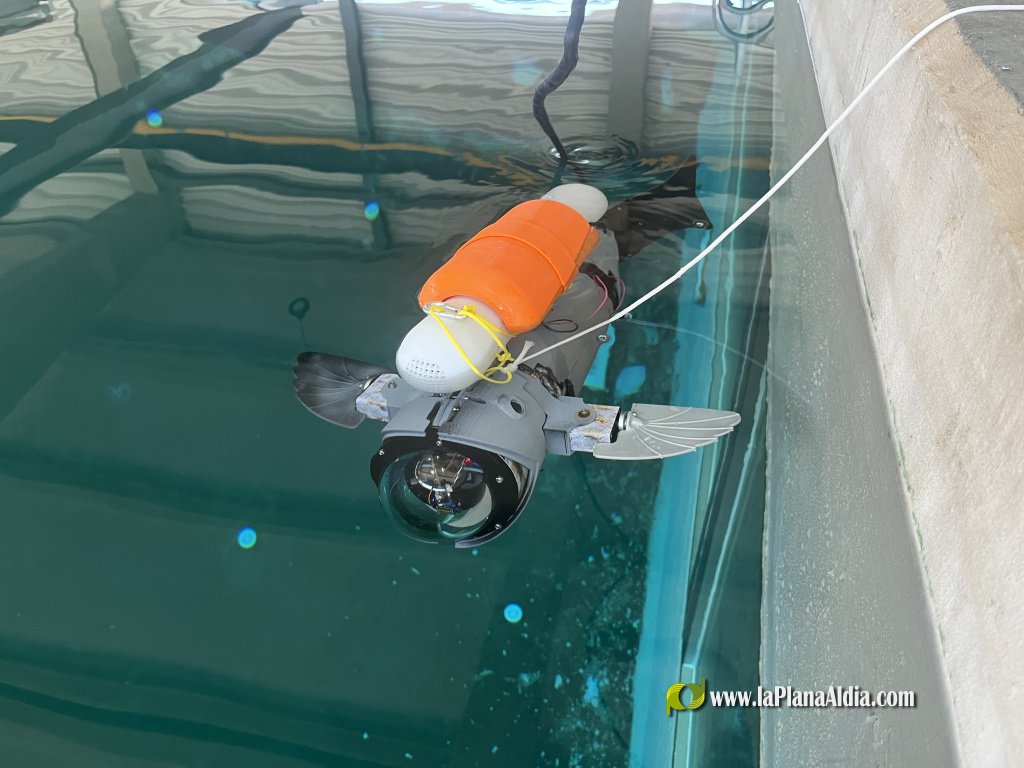
Els resultats experimentals han confirmat la viabilitat funcional del prototip, amb alta maniobrabilitat i una precisió fiable en la detecció d'objectes. S'han realitzat proves d'inspecció de xarxes, teleoperació, recopilació de dades i desplegament de sensors en condicions controlades. Segons l'equip investigador, la flexibilitat demostrada per UJIFISH-I és essencial en entorns on els requisits de monitorització varien segons l'espècie, la infraestructura o les condicions ambientals.
UJIFISH-I representa un avenç significatiu en l'acuicultura de precisió i la robòtica submarina, en proporcionar una eina que afavoreix operacions ambientalment responsables i redueix la necessitat d'intervenció humana.
Remitido | Fotografies: Remitido