La Universitat Jaume I (UJI) presenta UJIFISH-I, pez robótico modular para la acuicultura que reduce el estrés de los peces
El Centro de Investigación en Robótica y Tecnologías Subacuáticas (CIRTESU) de la Universitat Jaume I de Castelló ha creado un prototipo experimental de pez robótico modular e bioinspirado (UJIFISH) para la inspección, la teleoperación híbrida y el despliegue de sensores en la acuicultura.
La novedad reside en un diseño funcional que elimina factores de estrés, como hélices o iluminación de alta intensidad, y mantiene estándares de modularidad e interoperabilidad.
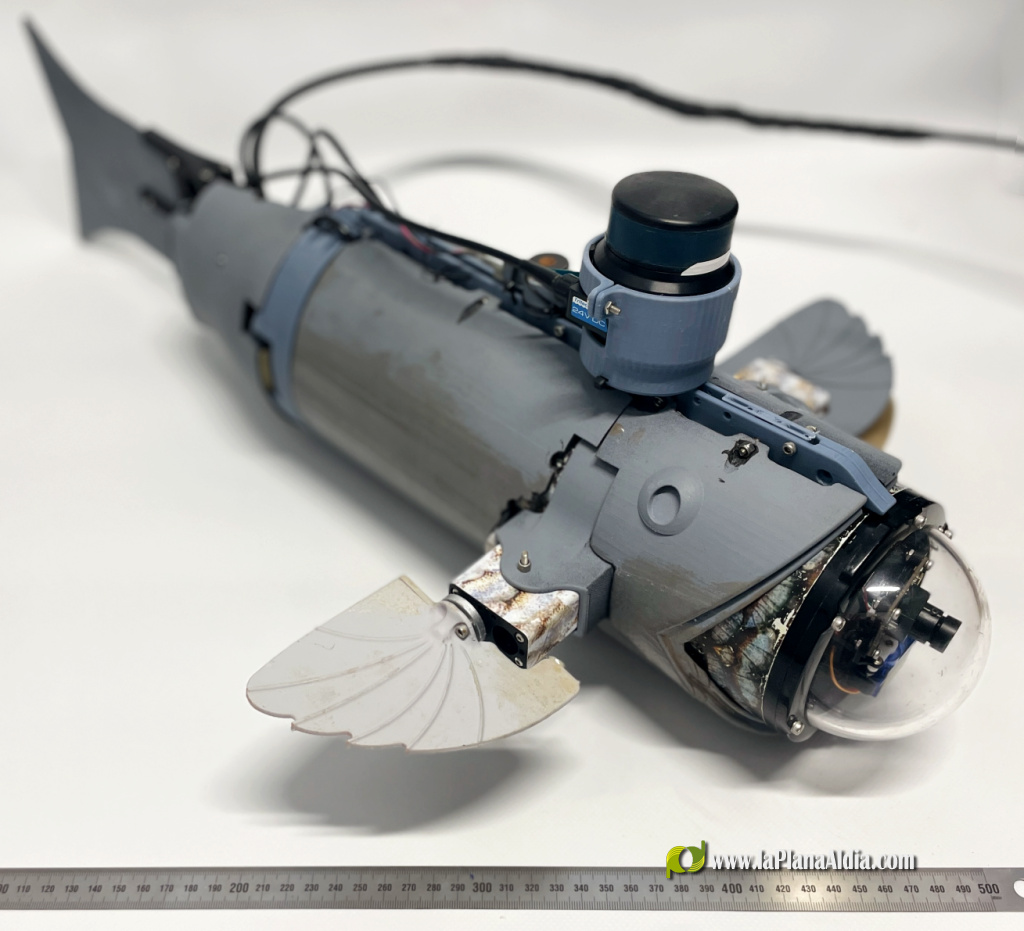
El diseño, desarrollo y validación técnica de esta plataforma robótica biomimética con forma de pez ha sido concebido para minimizar la perturbación del entorno y el estrés que padecen los peces frente a otros robots, gracias a una arquitectura que utiliza una propulsión ondulatoria bioinspirada, que reduce el ruido mecánico, la turbulencia hidrodinámica y las perturbaciones físicas que pueden alterar el comportamiento natural.
Está equipado con un avanzado sistema de detección modular para adquisición de datos en tiempo real y transmisión simultánea de imágenes, con comunicación por cable, aunque su capacidad es híbrida y también puede comunicarse por módem acústico.
Para la visión, utiliza un sistema panorámico de 180 grados que ofrece visión frontal y lateral. Puede descender a 20 metros de profundidad y permite control remoto a una distancia de entre 150 metros (vertical) y 500 metros (horizontal) mediante módem.
Su diseño incorpora sensores para mediciones continuas (temperatura del agua y profundidad) y permite incorporar otros sensores para recabar datos (salinidad y conductividad, pH, oxígeno disuelto o gases). Facilita la inspección directa de las estructuras de red y el monitoreo de las condiciones del agua y del entorno próximo a los peces, y cuenta con un sistema de despliegue que permite transportar y liberar componentes auxiliares en ubicaciones específicas.
La geometría y las dimensiones de UJIFISH se han escalado para coincidir con peces adultos y su frecuencia de aleteo. El mecanismo de cola oscilante está accionado por servomotores impermeables; se han eliminado todos los actuadores de alta frecuencia y se ha priorizado la integración de sensores internos para evitar señales intermitentes. De este modo, la natación produce perfiles hidrodinámicos más suaves y una menor perturbación acústica.
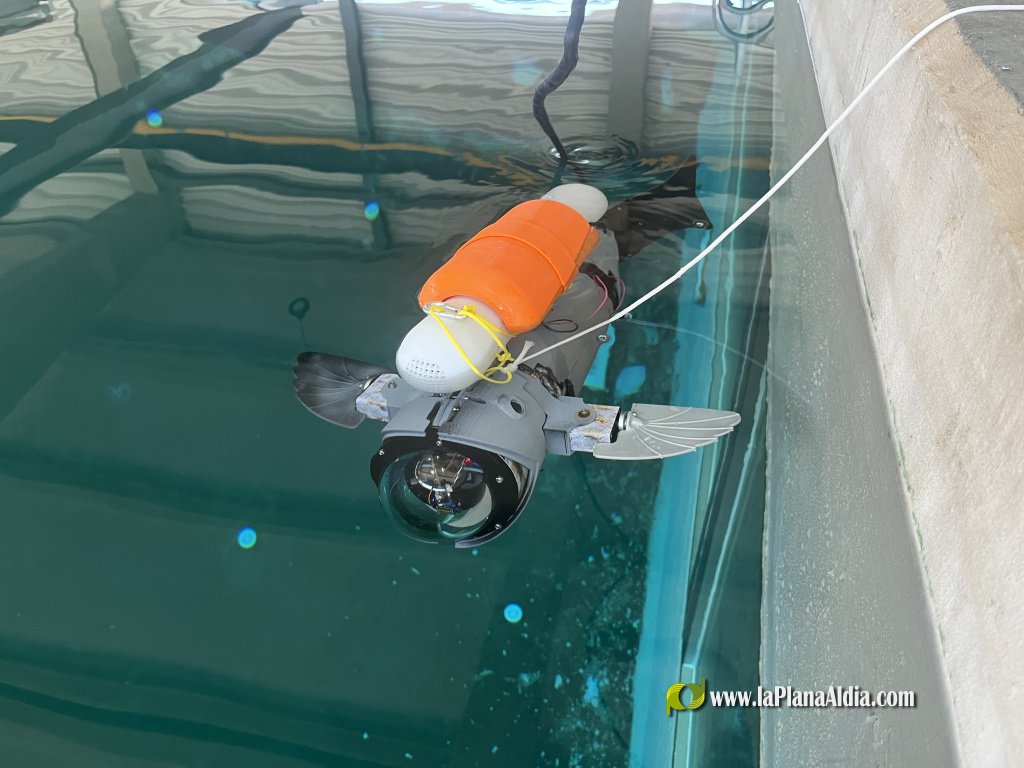
Los resultados experimentales han confirmado la viabilidad funcional del prototipo, con alta maniobrabilidad y una precisión fiable en la detección de objetos. Se realizaron pruebas de inspección de redes, teleoperación, recopilación de datos y despliegue de sensores en condiciones controladas. Según el equipo investigador, la flexibilidad demostrada por UJIFISH-I es esencial en entornos donde los requisitos de monitorización varían según la especie, la infraestructura o las condiciones ambientales.
UJIFISH-I representa un avance significativo en la acuicultura de precisión y la robótica submarina, al proporcionar una herramienta que favorece operaciones ambientalmente responsables y reduce la necesidad de intervención humana.
Remitido | Fotografías: Remitido